| 1. ข้อใดคือ รูป Motor servo 180 องศา |
1. 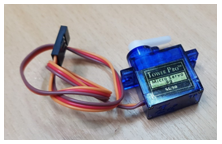 |
2.  |
3.  |
4.  |
| |
|
| 2. จากรูป มีชื่อเรียกว่าอย่างไร |
|
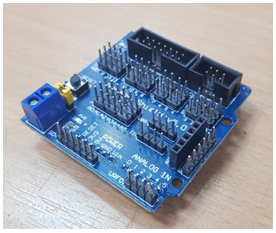 |
1. บอร์ด Arduino UNO R3 |
| 2. มอเตอร์ L298N Dual H-Bridge Motor Controller |
| 3. Sensor Shield |
| 4. LCD Display Module 16*2 |
| |
| |
|
| 3. “มีขา Trig และ Echo เพื่อรับ-ส่ง สัญญาณเสียง” หมายถึงอุปกรณ์ในข้อใด |
| 1. Infrared Remote Control |
2. Humidity Sensors (DHT11) |
| 3. Modules tracking sensor |
4. Ultra Sonic Sensor (HC-SR04) |
| |
|
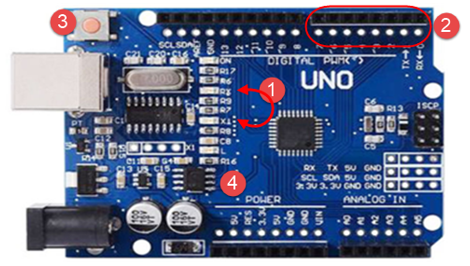
| 4. จากรูป ผู้เขียนโปรแกรมสามารถเสียบสาย DATA (ข้อมูล) ผ่านขาใด |
 |
1. GND |
| 2. I/O |
| 3. VCC |
| 4. ไม่มีข้อใดถูก |
| |
| 11. ข้อใดกล่าวถึงไมโครคอนโทรลเลอร์ได้ถูกต้องที่สุด |
| |
1. ชิปที่ใช้เป็นหน่วยประมวลผลกลางของเครื่องไมโครคอมพิวเตอร์ |
| |
2. ไมโครคอนโทรลเลอร์รวมเอาซีพียู, หน่วยความจำ และพอร์ต ซึ่งเป็นส่วนประกอบหลักสำคัญของระบบคอมพิวเตอร์เข้าไว้ด้วยกัน โดยทำการบรรจุเข้าไว้ในตัวเดียวกัน |
| |
3. ฮาร์ดแวร์ชิ้นหนึ่งที่ทำให้คอมพิวเตอร์ของคุณมีปฏิสัมพันธ์กับแอปพลิเคชันและโปรแกรมต่าง ๆ ที่ติดตั้งไว้ |
| |
4. ไม่มีข้อใดถูก |
| |
|
|
| 12. ข้อใดไม่ใช่การวิเคราะห์ วางแผน และปฏิบัติตามกระบวนการทำงาน |
| |
1. วิเคราะห์ปัญหา |
2. ออกแบบวิธีการแก้ปัญหา |
| |
3. เขียนโปรแกรม |
4. แหล่งข้อมูล |
| |
|
|
| 13. การวางแผนในการแก้ปัญหา โดยใช้วิธีเขียนลำดับขั้นตอนการแก้ปัญหาที่เรียกว่า |
| |
1. อัลกอริทึม (Algorithm) |
2. การเขียนรหัสจำลอง (Pseudo code) |
| |
3. การเขียนผังงาน (Flowchart) |
4. โปรแกรมต้นฉบับ (Source code) |
| |
|
|
| 14. รูปผังงานในการเขียนโปรแกรมเป็นรูปทรงเลขาคณิตต่อไปนี้มีชื่อเรียกว่าอย่างไร |
 |
| |
1. กระบวนการประมวลผล |
2. จุดเริ่มต้นหรือจุดสิ้นสุดของโปรแกรม |
| |
3. การตัดสินใจ |
4. ชุดกระบวนการที่เตรียมไว้แล้ว |
| |
|
|
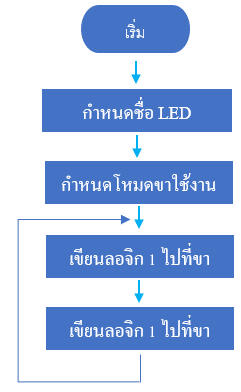
| 15. จากรูปคือแปลงลำดับขั้นตอนการทำงานของโปรแกรมในข้อใด |
 |
| |
1.  |
2.  |
| |
3.  |
4.  |
| |
| 16. ข้อใดคือ แถบคำสั่งเรียกใช้ไลบรารีเพิ่มเติม |
| |
1. Import Library |
2. Verify/Compile |
| |
3. Show Sketch folder |
4. Add File |
| |
|
|
| 17. หากต้องการตั้งค่าหน้ากระดาษของไฟล์งานปัจจุบัน ควรเลือกเมนูใด |
| |
1. Page Setup |
2. Increase Indent |
| |
3. Find Previous |
4. Find Next |
| |
|
|
| 18. ข้อใดคือ คำสั่งที่ใช้อ้างอิงไฟล์ภายนอก |
| |
1. #include |
2. int |
| |
3. delay |
4. pinMode |
| |
|
|
| 19. ข้อใดอธิบายฟังก์ชัน void setup() ได้ถูกต้องที่สุด |
| |
1. ส่วนที่ใช้ในการกำหนดชนิดตัวแปรแบบนอกฟังก์ชันหรือประกาศฟังก์ชัน |
| |
2. ฟังก์ชันที่ทำงานหลังจากฟังก์ชัน setup() ได้ทำงานเสร็จสิ้นไปแล้ว |
| |
3. ฟังก์ชันแรกที่ถูกเรียกใช้นิยมใช้กำหนดค่าหรือเริ่มต้นใช้งานไลบารี่ต่างๆ |
| |
4. การอ้างอิงไฟล์จากภายในหรือการอ้างอิงไฟล์ไลบารี่ที่มีอยู่แล้วใน Arduino |
| |
|
|
| 20. ข้อใดอธิบายฟังก์ชัน ฟังก์ชัน void loop () ได้ถูกต้องที่สุด |
| |
1. ฟังก์ชันที่ทำงานหลังจากฟังก์ชัน setup() ได้ทำงานเสร็จสิ้นไปแล้ว |
| |
2. การตรวจสอบการทำงานของไดร์ฟเวอร์ด้วยการเชื่อมต่อบอร์ด Arduino |
| |
3. ส่วนที่ใช้ในการกำหนดชนิดตัวแปรแบบนอกฟังก์ชันหรือประกาศฟังก์ชัน |
| |
4. การอ้างอิงไฟล์ Wire.h และไฟล์ Time.h ซึ่งเป็นไลบารี่พื้นฐาน |
| |
| 21. อุปกรณ์ที่เป็นการแสดงผลแบบเอาท์พุต (Output) ต้องใช้ฟังก์ชันใดประกาศขาก่อน |
| |
1. int LED[] |
2. digitalWrite() |
| |
3. pinMode() |
4. analogRead() |
| |
|
|
| 22. มอเตอร์ที่ใช้ในการควบคุมทิศทางและความเร็วของมอเตอร์ในที่นี้คือ มอเตอร์ในข้อใด |
| |
1. มอเตอร์ไร้สาย 2 Mode 7/10CH |
2. มอเตอร์ DC 200A |
| |
3. มอเตอร์ Driver L293D |
4. มอเตอร์ Drive Module L298N |
| |
|
|
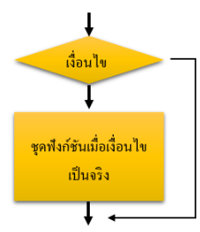
| 23. จากรูปคือฟังก์ชันในข้อใด |
 |
| |
1. ฟังก์ชัน switch |
2. ฟังก์ชัน if-else if-else |
| |
3. ฟังก์ชัน if |
4. ฟังก์ชัน if-else |
| |
|
|
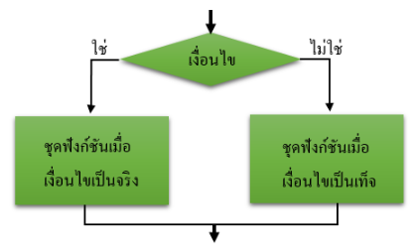
| 24. จากรูปคือฟังก์ชันในข้อใด |
 |
| |
1. ฟังก์ชัน if |
2. ฟังก์ชัน if-else |
| |
3. ฟังก์ชัน if-else if-else |
4. switch |
| |
|
|
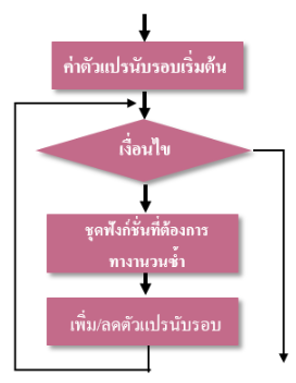
| 25. จากรูปคือฟังก์ชันในข้อใด |
 |
| |
1. ฟังก์ชัน for |
2. ฟังก์ชัน while |
| |
3. ฟังก์ชัน while(1) |
4. ฟังก์ชัน |
| |
| 26. ข้อใดคือ Web Editor Arduinoสำหรับเขียนโปรแกรมที่ต้องการทดลองวงจรโดยที่ยังไม่มีวงจรจริง |
| |
1. https://www.tinkercad.com/ |
2. https://www.kid-bright.org/simulator/home |
| |
3. https://makecode.microbit.org/ |
4. https://blockly.programming.in.th/ |
| |
|
|
| 27. หากต้องการต่อวงจร ควรเลือกเมนูในข้อใด |
| |
1. 3D Designs |
2. Circuits |
| |
3. Codeblocks |
4. Lessons |
| |
|
|
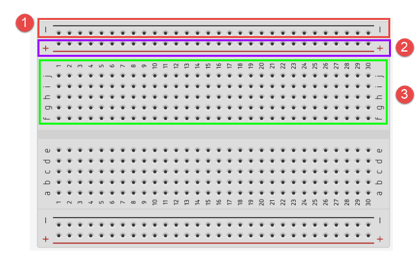
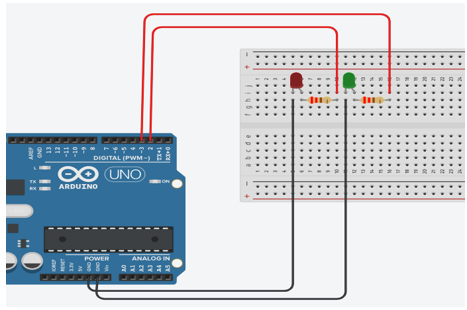
| 28. จากรูปการต่อวงจรควรเสียบขา Signal (data) ที่หมายเลขใด |
 |
| |
1. หมายเลข 1 |
2. หมายเลข 2 |
| |
3. หมายเลข 3 |
4. ไม่มีข้อถูก |
| |
|
|
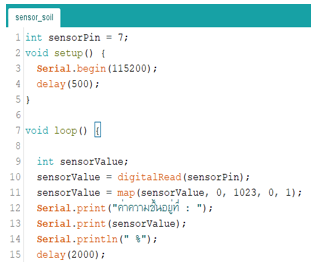
| 29. จากรูปควรใช้ฟังก์ชันส่งค่าในข้อใด |
 |
| |
1. digitalWrite() |
2. analogRead() |
| |
3. pinMode() |
4. Serial.print() |
| |
|
|
| 30. ผู้เขียนโปรแกรมสามารถดูผลลัพธ์แสดงจอได้จากข้อใด |
| |
1. แผงควบคุม |
2. Components |
| |
3. Serial Port |
4. Serial Monitor |
| |
|
|
| 31. ข้อใดถูกต้องที่สุดเกี่ยวกับภาพรวม Processing |
| |
1. ซอฟท์แวร์ระบบเปิด ซึ่งเป็นโปรแกรมออกแบบที่เน้นด้านการวาดภาพและการแสดงผลในรูปแบบ 2D, และ 3D |
| |
2. การแสดงผลในรูปแบบของการวาดภาพ และ Processing ยังสามารถนำมาประยุกต์ |
| |
3. Processing และ Arduino ใช้หลักการในการเขียนโปรแกรมเหมือนกัน โดยมีพื้นฐานมาจากภาษา C/C++ |
| |
4. อุปกรณ์ควบคุมขนาดเล็ก ซึ่งบรรจุความสามารถที่คล้ายคลึงกับระบบคอมพิวเตอร์ |
| |
|
|
| 32. ข้อใดไม่ใช่ตัวต้านทานแบบค่าคงที่ |
| |
1. ตัวต้านทานชนิดคาร์บอนผสม (Carbon Composition) |
2. ตัวต้านทานแบบเปลี่ยนค่าได้ (Variable Resistor) |
| |
3. ตัวต้านทานแบบฟิล์มโลหะ ( Metal Film) |
4. ตัวต้านทานแบบแผ่นฟิล์มหนา ( Thick Film Network) |
| |
|
|
| 33. ข้อใดถูกต้องที่สุดเกี่ยวกับตัวต้านทานแบบปรับค่าได้ |
| |
1. โครงสร้างของตัวต้านทานแบบนี้ทำมาจากแผ่นฟิล์มบาง |
| |
2. โครงสร้างภายในทำมาจากคาร์บอนเซรามิค หรือพลาสติกตัวนำใช้ในงานที่ต้องการเปลี่ยนค่าความต้านทานบ่อย ๆ |
| |
3. ตัวต้านทานแบบฟิล์มโลหะทำมาจากแผ่นฟิล์มบางของแก้วและโลหะหลอมเข้าด้วยกันแล้วนำไปเคลือบที่เซรามิค |
| |
4. ไม่มีข้อใดถูก |
| |
|
|
| 34. ข้อใดถูกต้องที่สุดเกี่ยวกับหลอดฟลูออเรสเซนต์ |
| |
1. เป็นหลอดไฟฟ้าระบบปล่อยประจุ ที่บรรจุไอปรอทความดันต่ำไว้ |
| |
2. เป็นหลอดที่ให้แสงสว่างโดยการให้ความร้อนแก่ไส้หลอดที่เป็นลวดโลหะกระทั่งมีอุณหภูมิสูงและเปล่งแสง |
| |
3. เป็นหลอดที่มีแสงแดง ๆ คล้ายแสงเทียน |
| |
4. เป็นหลอดที่ใช้ก๊าซฮาโลเจนบรรจุภายใน ทำให้ทนทานกว่าหลอดไส้ปกติ |
| |
|
|
| 35. กลไกเบื้องหลังการทำงานของไดโอดเปล่งแสงต้องอธิบายด้วยทฤษฎีในข้อใด |
| |
1. ทฤษฎีบทเกี่ยวกับภาวะเอกฐานเชิงความโน้มถ่วง |
| |
2. ทฤษฎีการเคลื่อนที่ของอิเล็กตรอนที่เรียกกันว่า Band Theory of Solids |
| |
3. ทฤษฎีแคลคูลัสเชิงปริพันธ์และอนุพันธ์ |
|
| |
4. Schwarzschild metric เป็นที่มาของรัศมีชวาทซ์ชิลท์ |
|
| |
|
|
| 36. ข้อใดอธิบายเรื่องการรับ-ส่ง ค่าแสงจาก Tracking Sensor TCRT5000 ได้ไม่ถูกต้อง |
| |
1. ถ้านำเอา Sensor จ่อกับกระดาษสีขาว Sensor TCRT5000 จะส่งค่า analog มากกว่า 500 |
| |
2. ถ้านำเอา Sensor จ่อกับกระดาษที่มีหมึกสีดำ Sensor TCRT5000 จะส่งค่า analog น้อยกว่า 500 |
| |
3. Tracking Sensor TCRT5000 จะใช้หลักการตกกระทบของแสง |
| |
4. กระดาษสีดำจะดูดกลืนแสง และกระดาษสีขาวจะสะท้อนแสง |
| |
|
|
| 37. ข้อใดอธิบายเรื่อง การต่อใช้งานสวิตช์กับพอร์ตแอนาลอก ได้ถูกต้องที่สุด |
| |
1. สวิตช์ที่ใช้เป็นชนิดกดดับ ปล่อยติด |
|
| |
2. เมื่อนำมาใช้งานจำเป็นจะต้องใช้พอร์ตในการเชื่อมต่อ 1 ช่องต่อสวิตช์ 1 ตัว |
| |
3. สัญญาณเข้าที่เป็นแอนาลอก ซึ่งสามารถแยกความแตกต่างได้ 1024 |
| |
4. รับสัญญาณจากกลไกเดียว |
|
| |
|
|
| 38. “ Single-wire Two-way Serial interface ” หมายถึงข้อใด |
| |
1. ความละเอียดในการวัด 1 องศาเซลเซียส |
2. การสื่อสารอนุกรมสองทางโดยใช้สายเส้นเดียว |
| |
3. โมดูลแสดงผลตัวเลข 4 หลัก แบบมีจุดนาฬิกาคั่น |
4. แต่ละชุดข้อมูลที่รับมามีความยาวยาว 2 บิต |
| |
|
|
| 39. “สามารถทำกิจกรรมกลางแจ้งได้ตามปกติ แต่ถ้าเป็นผู้ที่ต้องดูแลสุขภาพเป็นพิเศษ หากมีอาการเกี่ยวกับระบบทางเดินหายใจ และระคายเคืองตาไม่ควรทำกิจกรรมกลางแจ้งนาน” หมายถึงดัชนีคุณภาพในข้อใด |
| |
1. 0 – 25 คุณภาพอากาศ ดีมาก |
2. 26-50 คุณภาพอากาศ ดี |
| |
3. 51-100 คุณภาพอากาศ ปานกลาง |
4. 101-200 คุณภาพอากาศ เริ่มมีผลกระทบ |
| |
|
|
| 40. ข้อใดอธิบายเรื่องหลักการทำงานของเซ็นเซอร์ PM 2.5 ได้ถูกต้องที่สุด |
| |
1. การสื่อสารโดยใช้สายเส้นเดียวนั้นจำเป็นต้องใช้โปรโตคอลที่ตกลงกันไว้ระหว่างตัว MCU |
| |
2. ในสภาวะปกติหน้าสัมผัส NC (Normally Close) นี้จะต่อเข้ากับขา COM (Common) |
| |
3. โมดูลแต่ละอันประกอบด้วยสวิตช์ปรอทไฟ LED |
| |
4. หากการเปลี่ยนแปลงความเข้มข้นมีขนาดเล็กเซ็นเซอร์จะทำงานในโหมดเสถียรโดยมีช่วงเวลาจริง 2.3 |
| |
|
| 41. “ฟังก์ชัน ค่าคงที่ โปรแกรมควบคุมการทำงานหรือโครงสร้าง” จากข้อความพบในหน้าต่างใด |
| |
1. Block Diagram |
2. Front Panel |
| |
3. NI-VISA |
4. VI package |
| |
|
|
| 42. โปรแกรมในข้อใดใช้สำหรับติดต่อบอร์ด Arduino เพื่อควบคุมไฟ LED ในการทดลองนี้ |
| |
1. โปรแกรม NI-VISA |
2. โปรแกรม LabVIEW |
| |
3. โปรแกรม IDE |
4. โปรแกรม VI Package |
| |
|
|
| 43. ภาษา Executable Program หมายถึงข้อใด |
| |
1. ภาษาที่สามารถทำงานได้ทันที |
2. ภาษาที่ไม่มีโปรแกรมนำทาง |
| |
3. ภาษาแปลงจากบล็อกคำสั่งเป็นภาษาอื่น |
4. เป็นภาษาที่แสดงผลผ่านหน้าเว็บบราวเซอร์ |
| |
|
|
| 44. การเชื่อมต่อ LED เข้ากับ Write ต้องใช้ชุดคำสั่งในข้อใด |
| |
1. Programming --> Timing |
2. Programming --> Synchronization |
| |
3. Programming --> Report Generation |
4. Programming --> Comparison |
| |
|
|
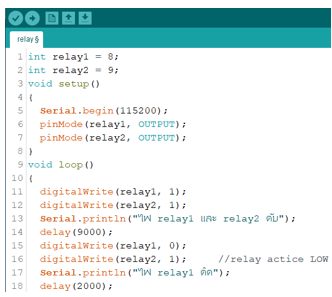
| 45. จากโค้ดคำสั่งบรรทัดที่ 12 หมายถึงข้อใด |
| |
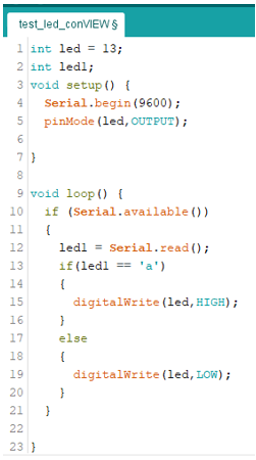 |
1. เป็นฟังก์ชันการรับค่าจาก Serail Port |
| |
2. led1 รับค่าที่นำเข้า |
| |
3. ค่าที่รับเข้ามาจะเก็บที่ตัวแปร led1 |
| |
4. ไฟ led ที่บอร์ด Arduino ติด |
| |
|
| |
|
|
| 46. ข้อใดอธิบายเกี่ยวกับการต่อขาของ Keypad ได้ถูกต้องที่สุด |
| |
1. Keypad มีสายที่ต้องต่อเข้าบอร์ด Arduino ทั้งหมด 9 เส้น |
| |
2. ต่อสาย GND จาก Keypad เข้าสู่ช่อง GND บนบอร์ด Arduino |
| |
3. ต่อสายไฟจาก Keypad เข้าสู่ช่อง VIN บนบอร์ด Arduino |
| |
4. เส้นที่ 1 ของ Keypad ต่อเข้ากับช่อง Rx บนบอร์ด Arduino |
| |
|
|
| 47. วงจร H-Bridge ของบอร์ดขับมอเตอร์ L298N ทำหน้าที่อะไร |
| |
1. ควบคุมด้วยสัญญาณ PMW |
2. ขับกระแสเข้ามอเตอร์ |
| |
3. ปรับความถี่ให้เหมาะสมกับมอเตอร์ |
4. หมุนการทำงานทันที |
| |
|
|
| 48. รีโมทคอนโทรล จะสามารถสั่งงานได้ต้องประกอบด้วย 2 สิ่ง คือข้อใด |
| |
1. รหัส และ ตัวส่งสัญญาณ |
2. ตัวส่ง และ รับคลื่นเสียง |
| |
3. ตัวกลาง และ คลื่นแสง |
4. คลื่นตามยาว และ คลื่นแม่เหล็กไฟฟ้า |
| |
|
|
| 49. Blynk เป็นแอปพลิเคชันบนโทรศัพท์มือถือ (Mobile Application) สำหรับระบบ Internet of Things (IoT) อุปกรณ์ใดที่ใช้เชื่อมต่อระหว่างแอปพลิเคชัน Blynk กับ บอร์ด Arduino |
| |
1. บอร์ด Arduino |
2. IR Infrared |
| |
3. บอร์ด ESP8266 |
4. I2C |
| |
|
|
| 50. ข้อใดคือคำสั่ง การรับ-ส่งข้อมูลระหว่างแอพพลิเคชัน Blynk กับ NodeMCU ESP8266 |
| |
1. #include |
2. SimpleTimer timer; |
| |
3. #define BLYNK_PRINT Serial |
4. char authen |
| |